Python Lab 5
Duży (no, średni) projekt
Biblioteka Pygame, yay!
Dzisiaj będziemy pracować nad odrobinę większym projektem, wprowadzimy też tematykę zewnętrznych bibliotek w pythonie. Szkielet projektu do pobrania tutaj
Biblioteki
Biblioteki w Pythonie to zestawy gotowych narzędzi (funkcji, klas, modułów), które ktoś już napisał, aby ułatwić Ci pracę. Dzięki nim nie musimy tworzyć wszystkiego od zera. Dzisiaj będziemy korzystali z biblioteki pygame, ale bibliotek do pythona jest od groma, poznamy ich jeszcze kilka.
Przykład z życia:
Wyobraź sobie, że chcesz zbudować dom. Możesz:
- Wytworzyć każdy klocek samodzielnie (trwa wieki),
- Albo pójść do sklepu budowlanego i kupić gotowe cegły, okna, drzwi – i od razu budować.
Biblioteki w Pythonie są jak ten sklep z gotowymi częściami - ktoś je przygotował, a my jedynie z nich korzystamy.
Python ma zestaw wbudownych bibliotek:
import math
print(math.sqrt(16)) # Wynik: 4.0
Ale my będziemy korzystali z biblioteki, która nie jest dostarczana razem z pythonem - biblioteką tą będzie pygame. Aby ją zainstalować należy wykonać polecenie
pip install pygame
W terminalu. Alternatywnie można skorzystać z wbudowangeo w PyCharma modułu zarządzania bibliotekami 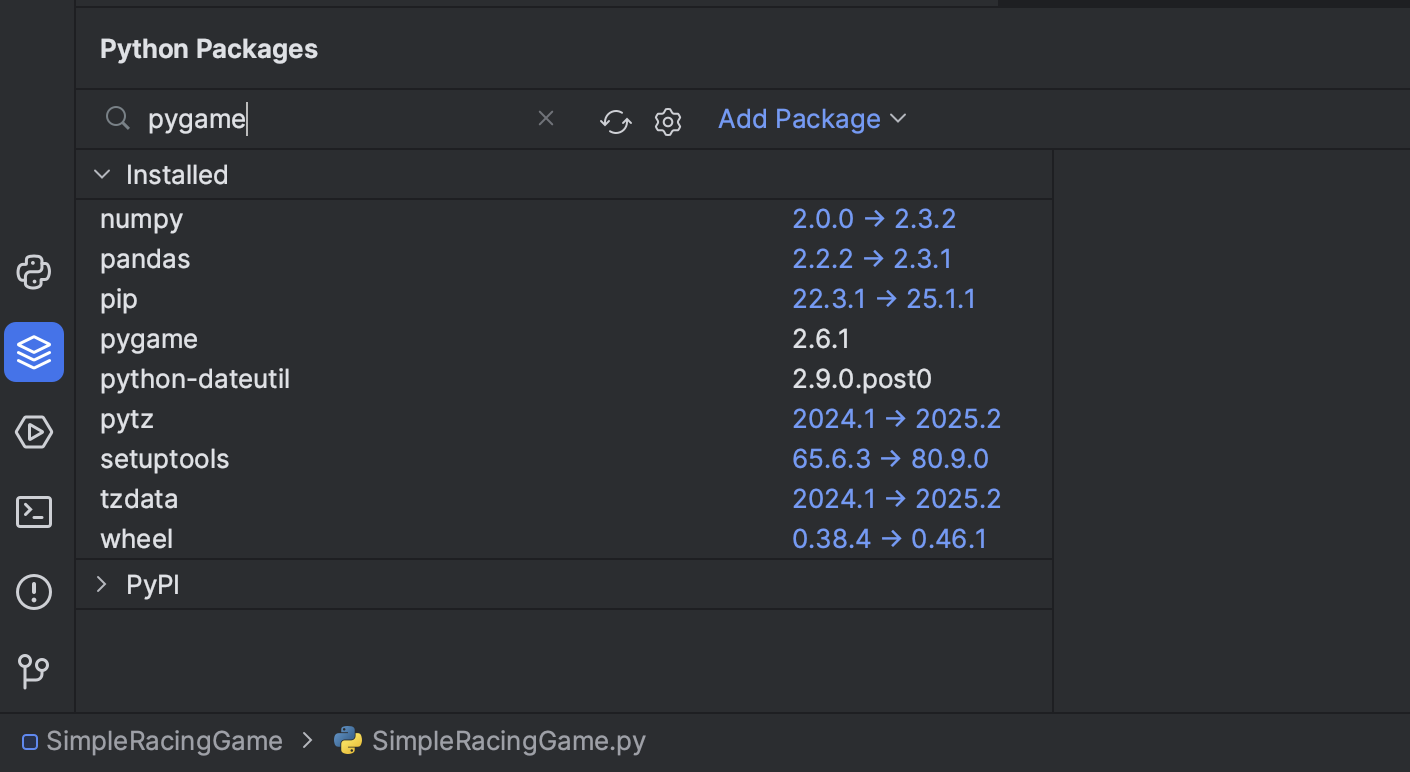
Aplikacja
Nasz dzisiejszy projekt, to prosta gra symulująca silnik i skrzynię biegów samochodu - poza nauką programowania będzie dzisiaj trochę fizyki, a przy okazji może niektórzy dowiedzą się jak działa samochód. Zaczniemy od pobrania szablonu projektu, uruchomienia i przeanalizowania istniejącego kodu.
Pygame to biblioteka w Pythonie do tworzenia gier 2D i prostych animacji. Pozwala rysować grafiki, wyświetlać tekst, odtwarzać dźwięki i reagować na klawiaturę czy myszkę.
Omówienie kodu linia po linii:
1. Import bibliotek
import pygame
import os
pygame– biblioteka do gier.os– wbudowana biblioteka Pythona, która pomaga np. tworzyć ścieżki do plików (tak żeby działały na Windowsie i Linuxie).
2. Ustawienia gry
WIDTH = 720
HEIGHT = 480
METER = 16
FPS = 60
- WIDTH i HEIGHT – rozmiar okna gry (szerokość i wysokość w pikselach).
- METER – wygląda na skalę lub jednostkę (1 „metr” = 16 pikseli, przydatne np. do obliczeń).
- FPS – klatki na sekundę (ile razy na sekundę ekran będzie odświeżany).
3. Inicjalizacja Pygame
pygame.init()
pygame.font.init()
- pygame.init() – uruchamia wszystkie podstawowe moduły Pygame (grafika, dźwięk, czas).
- pygame.font.init() – włącza obsługę czcionek (żeby można było rysować tekst na ekranie).
4. Czcionka do wyświetlania tekstu
myfont = pygame.font.SysFont('Lucida Console', 30)
- Tworzy czcionkę systemową o nazwie „Lucida Console”, rozmiar 30 pikseli.
- Później można jej używać, żeby np. wyświetlić na ekranie napis „START!”.
5. Zegar gry
clock = pygame.time.Clock()
- Tworzy „zegar” do kontrolowania prędkości gry (np. żeby gra działała zawsze w 60 FPS, niezależnie od mocy komputera).
6. Wczytywanie obrazków
background1 = pygame.image.load(os.path.join('Assets', 'background1.png'))
background2 = pygame.image.load(os.path.join('Assets', 'background2.png'))
background3 = pygame.image.load(os.path.join('Assets', 'sky.png'))
vehicle = pygame.image.load(os.path.join('Assets', 'vehicle.png'))
- Wczytuje obrazki z folderu
Assets(np. tło gry i pojazd). os.path.join('Assets', 'background1.png')tworzy ścieżkę do pliku w bezpieczny sposób (działa na różnych systemach).
7. Prostokąty (pozycje i rozmiary obrazków)
bgrect1 = background1.get_rect()
bgrect2 = background2.get_rect()
bgrect3 = background3.get_rect()
vehiclerect = vehicle.get_rect()
- Każdy obrazek ma swój prostokąt (ang.
rect), który zawiera:- jego pozycję (x, y na ekranie),
- jego rozmiar (szerokość i wysokość).
- Dzięki temu łatwo można przesuwać lub wykrywać kolizje obiektów (np. czy pojazd dotknął przeszkody).
8. Tworzenie okna gry
WIN = pygame.display.set_mode((WIDTH, HEIGHT))
- Tworzy okno gry o wielkości 720x480 pikseli.
- Wszystkie obrazki i teksty będą rysowane właśnie na tym oknie.
9. Ustawienie tytułu okna
pygame.display.set_caption("1/4 mile race")
- Nadaje oknu gry tytuł, który zobaczysz na pasku u góry (np. w Windowsie).
To wszystko to setup naszego projektu. Przygotowujemy go w ten sposób do działania, ustawiamy jeszcze przed zasadniczym uruchomieniem gry wszystkie aspekty programu.
Wyświetlanie
Poniżej setupu znajdziemy funkcję display(), która odpowiada za wyświetlanie obrazów. Blit to metoda Pygame, która kopiuje obrazek (Surface) na inne miejsce (np. na główne okno gry WIN).
WIN.blit(background3, bgrect3)
WIN.blit(background2, bgrect2)
WIN.blit(background2, bgrect2.move(bgrect2.width, 0))
WIN.blit(background1, bgrect1)
WIN.blit(background1, bgrect1.move(bgrect1.width, 0))
WIN.blit(vehicle, (40, HEIGHT - 140))
Poza wyświetlaniem grafik funkcja display() obsługuje również nieskończone tło - w naszym wypadku obrazki mają dokładnie taki sam rozmiar jak okno gry. Zatem, za każdym razem, kiedy obraz tła przesuwa się o 1 piksel w lewo, to z prawej strony brakowałoby jednej kolumny pikseli, a po chwili cały obrazek zniknąłby poza oknem - dzięki zastosowaniu nieskończonego tła w momencie, kiedy znika nam kawałek obrazu z lewej strony, to doklejany jest on po prawej stronie.
if bgrect1.right <= 0 and bgrect1.left <= WIDTH:
bgrect1.x = 0
if bgrect2.right <= 0 and bgrect2.left <= WIDTH:
bgrect2.x = 0
Pętla zasadnicza
Tak naprawdę cała gra wykonywana jest w funkcji main(), a konkretnie w tzw. pętli zasadniczej lub pętli gry. Jest to pętla nieskończona:
running = True
while running:
#kod programu
Pętla ta będzie wykonywana tak długo, jak zmienna running == True. W naszym wypadku gra może zakończyć się tylko w momencie, w którym wciścięty zostanie klawisz q lub zamknięte zostanie okno z grą:
for event in pygame.event.get():
if event.type == pygame.QUIT:
running = False
if event.type == pygame.KEYDOWN:
if event.key == pygame.K_q:
running = False
Wszystkie obliczenia, które będą się wykonywały podczas wykonania programu będą musiały znajdować się wewnątrz tej pętli zasadniczej. Omówimy ją sobie po kolei:
keys = pygame.key.get_pressed()
Lista keys zawiera wszystkie wciśnięte w danym momencie klawisze. Dzięki tej liście będziemy mogli sobie w każdym momencie sprawdzić, jakie klawisze są wciśnięte, a jakie nie.
movement = METER * throttle * 5 / FPS * (-1)
Zmienna movement jest ściśle powiązana z wyświetlaniem tego, co mamy na ekranie. Nasza aplikacja dokonuje animacji elementów poprzez przesunięcie ich o określoną ilość pikseli - ale wszystkie nasze obliczenia będą wykonywane w jednostkach SI - m/s, km/h, metry itd. W tej zmiennej zmieniamy prędkość samochodu w jednostkach fizycznych na ruch w pikselach.
METERto przyjęta przeze mnie wartość pikseli w jednym metrze - 16 px w grze to 1 metr. Stała ta jest zadeklarowana na górze programuthrottleto wartość, w której ustalamy, czy pedał gazu jest wciśnięty, czy nie. Jeśli jest wciśnięty to wartoś to 1, jeśli nie to 0. Co za tym idzie, pojazd się obecnie nie porusza, jeśli throttle to 0.5- założona arbitralnie prędkość. Auto jedzie 5m/salbo 0m/s.FPS- wartość klatek na sekundę. Aplikacja dokonuje obliczeń 60 razy na sekundę - w związku z tym, jeśli liczymy prędkość wm/s, a wykonujemy obliczenie 60 razy w ciągu jednej sekundy, to musimy to obliczenie podzielić na 60.-1- przesunięcie w lewo. Bez tego samochód jechałby do tyłu
bgrect1.move_ip(movement, 0)
bgrect2.move_ip(movement / 4, 0)
Te dwie linie odpowiadają za przesunięcie tła - nasz samochód tak naprawdę się nie porusza - przesunięcie dotyczy tylko tła. Mamy dwa niezależne od siebie backgroundy - ten na pierwszym planie przesuwa się z taką prędkością jak samochód, ten na drugim tle przesuwa się z 1/4 tej prędkości.
for event in pygame.event.get():
if event.type == pygame.QUIT:
running = False
if event.type == pygame.KEYDOWN:
if event.key == pygame.K_q:
running = False
Pętla for, która sprawdza nam listę eventów. Wszystkie rzeczy, które wydarzą się w trakcie obejścia pętli zostaną dodane do listy pygame.event.get(). Tutaj możemy sprawdzić, czy wciśnięty został jakiś klawisz, będziemy tu obsługiwać wszystkie pojedyncze wciśnięcia klawiszy - np. wyłączenie aplikacji, zmianę biegów itd.
if keys[pygame.K_UP]:
throttle = 1
else:
throttle = 0
Tu sprawdzamy, czy jakiś klawisz jest przytrzymany - w ten sposób będziemy obsługiwali przyspieszanie i hamowanie.
clock.tick(FPS)
pygame.display.flip()
To sprawia, że nasza gra działa w stabilnych 60 klatkach na sekundę.
Pora na programowanie
Celem dzisiejszych zajęć będzie stworzenie jak najbardziej zbliżonej do rzeczywistości symulacji silnika samochodu, wraz ze skrzynią biegów, oporami powietrza, oporami toczenia itd.
Na początek zrobimy tak, żeby autko zwiększało swoją prędkość o 1 za każdym razem, kiedy w momencie wykonania wykryje, że wciśnięty jest klawisz w górę, a zmniejszało, kiedy nie jest wciśnięty. Wykonamy to poprzez wprowadzenie zmiennej speed, do której będziemy dodawać 1 co przejście pętli (60 razy na sekundę)
if keys[pygame.K_UP]:
speed += 1
else:
speed -= 1
Wprowadzenie zmiennej speed w tym miejscu wymaga od nas kilku modyfikacji - przede wszystkim, movement nie będzie już oparty o throttle, a o speed:
movement = METER * speed / FPS * (-1)
Możecie też zwrócić uwagę, że speed podkreśla się na czerwono - wynika to z tego, że program nie zna tej zmiennej, a każemy mu z niej korzystać oraz ją zwiększać. W związku z tym, jeszcze przed pętlą ustawmy jej wartość na 0:
speed = 0
Jak łatwo zauważyć po uruchomieniu gry z tymi zmianami dzieją się rzeczy straszne - autko ucieka nam do tyłu. Nie chcemy tego, nasz samochód ma jeździć tylko do przodu. Aby tego uniknąć musimy sprawić, aby prędkość nigdy nie spadła poniżej 0:
if keys[pygame.K_UP]:
speed += 1
elif speed >= 0:
speed -= 1
W pierwszej wersji programu samochód przesuwał się o 5 pikseli co tick (obejście pętli), teraz zmieniliśmy program tak, żeby tło przesuwało się o prędkość naszego autka.
Prędkość wyrażamy w metrach na sekundę, czyli jeśli nasze autko jedzie 20𝑚/𝑠 (72 𝑘𝑚/ℎ), to w ciągu sekundy powinno przesunąć się o 320 pikseli – w naszej grze jeden metr odpowiada 16px. W związku z tym, pomiędzy aktualizacjami ekranu powinno przesunąć się o 5px.
16 * 20 / 60 = 5
Oczywiście powyższy przykład, w którym co tick zwiększamy prędkość o 1 m/s powoduje, że nasze auto ma przyspieszenie 60 𝑚/𝑠! czyli po sekundzie będzie pędziło 60 m/s, czyli 216 km/h, a po dwóch sekundach będzie leciało 432km/h. Takiego przyspieszenia nie ma ani Tesla S Plaid, ani Bugatti Chiron, ani nawet samochody F1, nie mówiąc już o Citroenie C4 Picasso z 2011 roku z dwulitrowym Dieslem, którego tutaj symulujemy.
Urzeczywistnijmy najpierw to przyspieszenie. C4 Picasso z silnikiem 2.0 HDi osiąga 100 km/h (27,7 m/s) w 12.4 sekundy. Przyspieszenie, czyli zmianę prędkości w czasie możemy w prosty sposób z tego policzyć:
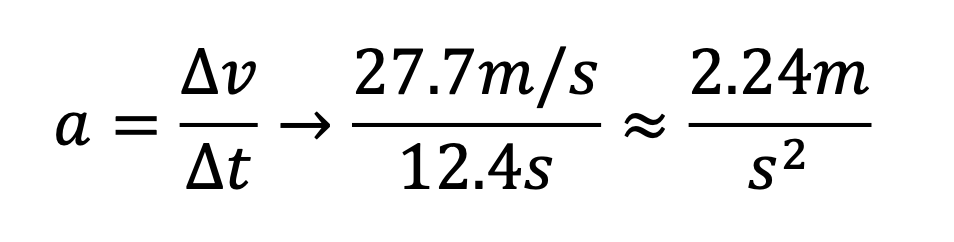
Czyli - uśredniając - samochód w każdej sekundzie zwiększa swoją prędkość o 2.24 m/s. Bląd, który popełniliśmy poprzednio wynikał z tego, że nie braliśmy pod uwagę tego, że nie dodawaliśmy 1 do prędkości co sekundę, a 60 razy na sekundę. Poprawiony kod będzie wyglądał tak:
if keys[pygame.K_UP]:
speed += 2.24/FPS
elif speed >= 0:
speed -= 2.24/FPS
Deklarowana przez producenta prędkość maksymalna C4 Picasso to 192 km/h, czyli
53,3 m/s. Ustawmy ją i zobaczmy, jak nam się będzie jechało z maksymalną prędkością.
if keys[pygame.K_UP] and speed < 53.3:
speed += 2.24/FPS
Napiszemy jeszcze hamowanie, bo hamulce są w samochodzie całkiem ważnym elementem.
Załóżmy, że auto z prędkości 130 km/h (36 m/s) zatrzymuje się w 72 m,
czyli do pełnego zatrzymania potrzebuje 2 sekund.
Czyli hamujemy z przyspieszeniem −18 m/s²! Zaprogramujmy to:
if keys[pygame.K_DOWN] and speed > 0:
speed -= 18/FPS
Wyświetlanie tekstu
Jak nasze autko wygląda już jakby jako-tako jeździło, to możemy zająć się wyświetlaniem informacji na ekranie. Zaczniemy od wyświetlenia w km/h prędkości, z jaką się poruszamy. Mamy już zadeklarowany font, którego będziemy używać, ale jeszcze nigdzie go nie wykorzystujemy.
W pętli, po wywołaniu display() umieścimy:
speedSurface = myfont.render(str(speed), True, (0,0,0))
WIN.blit(speedSurface, (0,0))
Kod speedSurface = myfont.render(str(speed), True, (0,0,0)) tworzy obrazek z napisem zawierającym aktualną prędkość (speed), z włączonym antyaliasingiem, w kolorze czarnym (RGB (0,0,0)), korzystając z wcześniej zdefiniowanej czcionki myfont.
WIN.blit(speedSurface, (0,0)) wyświetla ten obrazek w oknie gry WIN w lewym górnym rogu (współrzędne (0,0)).
W skrócie, te dwie linie odpowiadają za pokazanie wartości prędkości na ekranie gry.
Jednak po uruchomieniu gry widać radosny śmietnik:
Aby to posprzątać musimy:
- Zaokrąglić liczbę -
round() - Dodać opisy i jednostki
speedSurface = myfont.render("Speed: " + str(round(speed, 2)) + "m/s", True, (0,0,0))
WIN.blit(speedSurface, (0,0))
Prędkość wyświetla się w m/s, ale dla nas czytelniejsze są jednak kilometry na godzinę, dlatego przemnóżmy tę zaokrągloną prędkość przez 3,6.
Zadanie na zajęcia 1
W ten sam sposób dodaj wyświetlanie:
- przejechanego dystansu
- czasu
Aby obliczyć przejechany dystans nę będzie trzeba się specjalnie wysilać, bowiem mamy prędkość i czas. Z fizyki wiemy, że:
v = s / t → s = v * t
Stworzymy sobie zatem nową zmienną, do której co ticka będziemy dodawali prędkość / FPS. Obliczanie czasu również będzie wymagać stworzenia nowej zmiennej, np time, do której co ticka będziemy dodawali 1/FPS. Współrzędne (x,y) wyświetlanego tekstu to drugi argument w metodzie blit - lewy górny narożnik ma współrzędne (0,0)
Silnik i skrzynia biegów – trochę matematyki
Teraz trochę o tym, jak działa silnik i skrzynia biegów, czyli wchodzimy w poważniejszą symulację.
Silnik samochodu spalinowego, obracając się, generuje określoną siłę. Ta siła, a dokładniej moment obrotowy, przenoszony jest na koła, które obracając się przesuwają nasze auto do przodu.
Pomiędzy silnikiem a kołami jest jednak skrzynia biegów – każdy samochód ma obecnie 5 lub 6 przełożeń. Gdy samochód jest „na biegu”, czyli mamy załączony bieg i sprzęgło nie jest wciśnięte, koła są bezpośrednio sprzężone z silnikiem.
Jak działa skrzynia biegów?
Skrzynia biegów działa w dość prosty sposób – przekłada obroty kół na obroty silnika oraz moment obrotowy silnika na koła.
Dla przykładu, pierwszy bieg w C4 Picasso ma ratio 3.538, czyli 1 obrót koła równałby się około 3,5 obrotom silnika.
Dodatkowo skrzynie biegów mają final drive (przełożenie końcowe), które odnosi się do wszystkich biegów.
Dla tego samochodu final drive wynosi 4.18. Zatem 1 obrót kół na pierwszym biegu to:
3.538 × 4.18 = 14.8 obrotów silnika
Przełożenia biegów:
I 3.538 (14.8)
II 1.92 (8.03)
III 1.322 (5.52)
IV 0.975 (4.08)
V 0.76 (3.18)
VI 0.645 (2.7)
Moment obrotowy
Analogicznie jest z momentem obrotowym. Jeśli silnik produkuje 100 Nm, to na pierwszym biegu na koła przekładane będzie:
100 Nm × 14.8 = 1480 Nm
Moment obrotowy jest jednak miarą siły i dystansu, dlatego musimy jeszcze podzielić go przez promień koła.
Obliczanie promienia koła
C4 Picasso ma opony 215/45ZR18, co oznacza:
- szerokość opony: 215 mm,
- wysokość boczna: 45% szerokości,
- felgi: 18 cali.
Promień koła to:
(18 / 2 × 2.54) + (21.5 × 0.45) = 32.535 cm
czyli 0,32535 m.
Siła napędzająca auto
Mając moment obrotowy, możemy obliczyć siłę:
1480 Nm / 0.32535 m = 4548.94 N
To jest siła, która pcha auto do przodu.
Musimy jednak odjąć opór powietrza i opory toczenia, aby uzyskać realną siłę napędową.
C4 Picasso ma współczynnik oporu aerodynamicznego 0.30, a opór powietrza przyjmiemy na stałą wartość 600 N.
Ostatecznie:
4548.94 N − 600 N = 3948.94 N
Obliczanie przyspieszenia
Z fizyki wiemy, że:
F = m * a → a = F / m
Dla naszego auta:
3948.94 N / 1600 kg ≈ 2.46 m/s²
To tę wartość (podzieloną przez FPS) będziemy co „tick” pętli dodawać do naszej prędkości (albo odejmować, o tym później).
To teraz implementacja
Zacząć musimy od zadeklarowania stałych zawierających promień koła oraz final drive:
WHEEL_RAD = 0.32535
FINAL_DRIVE = 4.47
Następnie musimy stworzyć listę zawierającą przełożenia:
GEAR_RATIO = [0, 3.538, 1.92, 1.322, 0.975, 0.76, 0.654]
Tak, że zerowy element tablicy wynosi 0, czyli będzie symulował nam bieg jałowy (luz).
Bieg, na którym się aktualnie znajdujemy umieścimy w zmiennej gear i w pętli obsługującej eventy for event in pygame.event.get() napiszemy implementację zmiany biegów:
if event.key == pygame.K_e:
gear += 1
Jak łatwo zauważyć po uruchomieniu, teraz możemy wrzucić np. 17 bieg. Citroen C4 Picass może i miał pod maską diesla, ale nie był ciężarówką i miał skrzynię sześciobiegową, więc dopiszemy sobie warunek, który nie pozwoli wrzucić biegu wyższego, niż 6:
if event.key == pygame.K_e and gear < len(GEAR_RATIO)-1:
gear += 1
Analogicznie powinniśmy napisać mechanizm redukcji biegów, np. pod klawiszem w.
Teraz zadeklarujemy sobie zmienną torque, na razie ustawimy ją na 100, potem będziemy ją zmieniać. Generowana przez silnik siła działająca na nasze auto to:
(torque × GEAR_RATIO[gear] × final_drive) / r
a przyspieszenie to:
a = F / m
1/FPS tego przyspieszenia dodajemy do prędkości co obejście pętli.
force = torque * GEAR_RATIO[gear] * FINAL_DRIVE / WHEEL_RAD
acceleration = force/WEIGHT
WEIGHT = 1685
if keys[pygame.K_UP] and speed < 53.3:
speed += acceleration/FPS
Ze względu na to, że przyspieszenie może być ujemne będziemy musieli wprowadzić kilka zmian w programie. Trzeba wprowadzić do programu zmienną throttle wartą 1, gdy wciśnięty jest klawisz w górę lub 0, gdy nie jest wciśnięty (lub coś pomiędzy, jeśli używamy kontrolera analogowego). Throttle mnożymy przy obliczaniu siły pchającej nasz samochód, a następnie niezależnie od wciśnięcia klawisza dodajemy przyspieszenie do prędkości.
if keys[pygame.K_UP] and speed < 53.3:
throttle = 1
else:
throttle = 0
Opory
Poprawimy teraz opory. Na samochód działają dwa główne opory – toczenia oraz powietrza. Opór toczenia jest praktycznie stały, zwiększa się minimalnie wraz z prędkością, obliczymy go ze wzoru 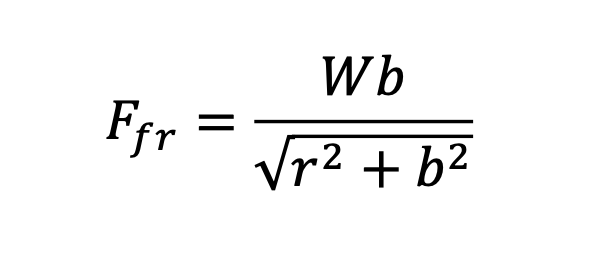
Gdzie:
- W – siła działająca na koła, czyli W = m * g,
gdzie m to masa pojazdu, a g – przyspieszenie grawitacyjne, g = 9.81 m/s². - b – powierzchnia styku opony z podłożem, przyjmujemy 1 cm = 0.01 m.
- r – promień koła.
To jest opór toczenia. Aby utrzymać stałą prędkość musimy generować silnikiem dokładnie tyle. Dochodzi jeszcze opór powietrza – ten zależny jest od prędkości samochodu. 
- p – stała gęstość powietrza,
- D – stała współczynnika oporu (dla nas 0.3),
- A – stała powierzchni napierającej, czyli powierzchnia przodu auta. Dla nas to 2,61 m²,
- V – obecna prędkość w m/s.
Dla samochodu jadącego 10 m/s (czyli 36 km/h) wartość oporu powietrza to 0.5 × p × D × A × V² = 46 N
Przy prędkości maksymalnej naszego samochodu ten opór to już 1334 N. Dużo. Teraz to umieścimy w obliczeniach:
rolling_resistance = WEIGHT*9.81*0.01/math.sqrt(WHEEL_RAD*WHEEL_RAD+0.01*0.01)
aero_drag = 0.5*1.2*speed*speed*AERO_DRAG*2.61
acceletarion = (force-rolling_resistance-aero_drag)/WEIGHT
Teraz nasz symulator jest w niektórych momentach bardzo dokładny, bo wyliczamy opory z porządnych wzorów, ale silnik nadal produkuje stałe 100𝑁𝑚 i nie mamy zaprogramowanych obrotów. Teraz to naprawimy.
Silniki spalinowe generują moment obrotowy zależnie od obrotów. W silnikach spalinowych największy moment obrotowy dostępny jest zazwyczaj w okolicach 4000-5000 obr/min (RPM). W silnikach diesla, maksymalny moment obrotowy jest zwykle niżej, w okolicach 2000 RPM. Poniżej znajdziemy wykres z hamowni dla C4 Picasso 2.0 HDi FAP 150 Exclusive
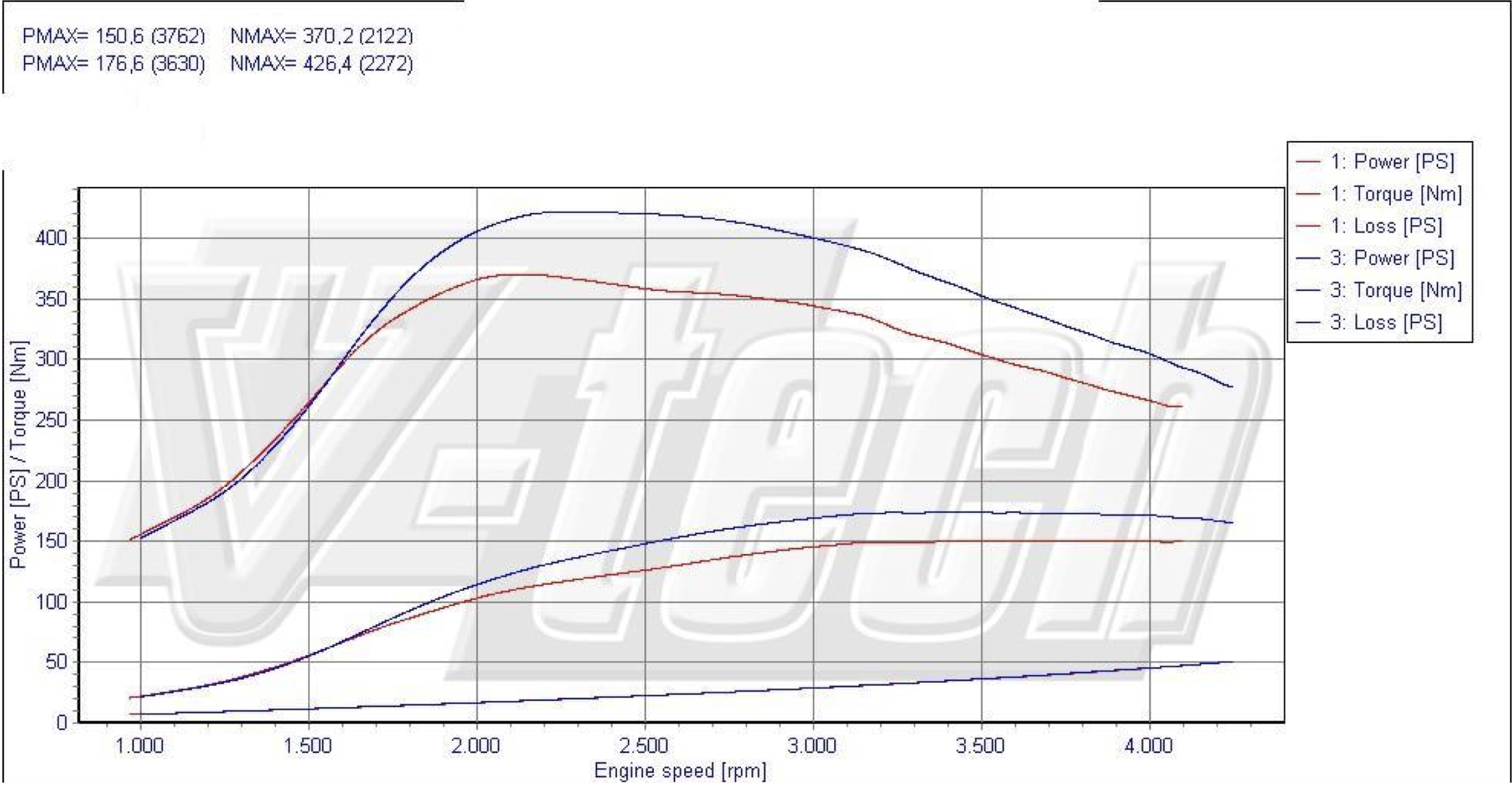
Z tego wykresu możemy odczytać, że największy moment obrotowy ten silnik generuje dla 2000 obrotów na minutę. – patrzymy na czerwoną linię u góry. Największy moment obrotowy przekłada się na największą siłę pchającą auto do przodu, także jeśli chcemy się jak najszybciej rozpędzać, to musimy tak zmieniać biegi, żeby silnik trzymał się w zakresie, w którym produkuje największy moment, czyli w okolicach 2-3k RPM, potem moment maleje.
Zadeklarujmy sobie zmienną eng_RPM z zabezpieczeniem, które nie pozwoli nam przekroczyć minimalnych (750 RPM) oraz maksymalnych (4250 RPM)
if eng_RPM < 750:
print("Silnik gaśnie")
eng_RPM = 750
if eng_RPM > 4250:
print("Odcina!")
eng_RPM = 4250
Musimy jeszcze te obroty jakoś wyliczyć. Obroty kół przekładają się bezpośrednio na silnik (i odwrotnie) więc użyjemy ich, aby policzyć bieżące obroty silnika.
wheel_RPM = speed/((WHEEL_RAD*2*math.pi)/60)
eng_RPM = wheel_RPM*GEAR_RATIO[gear]*FINAL_DRIVE
Pozostała nam w zasadzie ostatnia rzecz, bo cały czas jedziemy na momencie obrotowym 100Nm, co powoduje, że przy 125 km/h na 5 biegu samochód traci obroty, bo opory są większe niż siła generowana przez silnik. Proponuję stworzyć tablicę zawierającą moment co 250 RPM – do odczytania z powyższego wykresu. Na zerowym elemencie będziemy mieli moment dla 750 RPM, na pierwszym dla 1000, na drugim dla 1250 RPM itd.
TORQUE = [150, 160, 185, 260, 330, 370, 360, 355, 350, 340, 325, 300, 275, 260, 255, 0]
I teraz – moment obrotowy dla bieżących obrotów wyliczymy, dzieląc i zaokrąglając bieżące obroty silnika przez 250.
Dla przykładu:
3000 RPM / 250 RPM = 12
Dzięki temu, że zaokrąglamy, jeśli akurat mamy 3200 RPM, to:
3200 / 250 = 12.8
ale zaokrąglenie spowoduje, że wybierzemy bliższy element z tablicy, czyli 13.
Teraz chcielibyśmy wyciągnąć odpowiedni element z tablicy, ale tablica zaczyna się od momentu dla 750 RPM, więc 12. element tablicy tak naprawdę odpowiada 3500 RPM.
Dlatego musimy albo na początku tablicy dać dwa elementy 0, albo wyliczony indeks zmniejszyć o 2. Ja wybrałem tę drugą opcję:
torque = TORQUE[round(eng_RPM/250)-2]
Ważne jest, aby nie umieścić obliczania momentu obrotowego pomiędzy obliczaniem obrotów silnika a instrukcjami if, które je blokują, aby nie przekroczyły dopuszczalnych zakresów.
To jest krótki moment, w którym obroty mogą przekroczyć dopuszczalną wartość i wtedy wyjdziemy poza rozmiar tablicy.
Na tym kończymy gotowe materiały, a zagłębiać się można dalej.
Zwróćcie uwagę, że zaczęliśmy od „symulatora”, w którym samochód jechał ze stałą prędkością, dodaliśmy do niego przyspieszenie wyliczone na podstawie czasu 0–100 km/h.
Potem dodaliśmy opory, sztywny moment obrotowy, następnie obroty silnika i na ich podstawie wyliczaliśmy moment obrotowy.
Czy to już koniec rozwoju?
Trudno ustalić.
Jeśli naszym założeniem pozostaje jazda w jednym kierunku, to samochód ma jeszcze wiele mechanizmów, których nie przewidzieliśmy.
C4 Picasso ma napęd na przednią oś, a w momencie przyspieszania środek masy (punkt ciężkości) przesuwa się do tyłu, czyli tylna oś jest bardziej dociskana – to zmniejsza tarcie przednich kół i równocześnie siłę, z którą napędzają pojazd.
Idąc dalej – sprzęgło nie przenosi 100% mocy silnika na koła – część jest tracona na tarcie i oddawana w postaci ciepła.
Mówiąc o sprzęgle – tego mechanizmu też nie zaimplementowaliśmy.
A co z samym silnikiem?
Silnik jest przecież złożonym mechanizmem:
- tłoki,
- kompresja,
- cykle pracy tłoków,
- stopień sprężenia paliwa,
- jakość mieszanki.
To wszystko można w jakiejś mierze opisać matematycznie, a co za tym idzie – możliwe jest to do zaprogramowania.
Dalsze uproszczenia
Nie wspominając już o tym, że nasz samochód nie ma odwzorowanych jakichkolwiek skrętów, porusza się tylko w jednym kierunku.
Droga również może być wyboista, może się wznosić i opadać – a to bezpośrednio wpływa na opory, bo do sił, które musimy pokonać, dochodzi jeszcze grawitacja.
Podsumowanie
Jest bardzo wiele rzeczy, które musieliśmy lub chcieliśmy w trakcie tego spotkania pominąć.
To od założeń projektu zależy, w którym miejscu się zatrzymamy.